

Smart Hydraulic Robots
Toward Low-cost, High-Performance Remote Controlled Robots
Project 1: Hydraulic Hybrid Servo Press
Project 2: Hydraulic Hybrid Manipulator
Project 3: Retrofitting Hydraulic Excavator
Project 4: Air-Hydraulic Servo Press
Reference
Introduction
In addition to manufacturing sites, there is a strong demand for robots that can perform precise work and inspections by intuitive remote control in outdoor environments including urban areas, coastal areas, and mountainous areas, as well as extreme environments where humans cannot easily enter, such as underwater, space, nuclear plants, and disaster sites. In that sense, it is extremely important to realize a robust and easy-to-use robot at a low cost that is exactly halfway between industrial robots and civil engineering and construction machinery in terms of performance. Therefore, we aim to realize a low-cost, multifunctional robot using a new hydraulic circuit.
This project began in 2011. While servo valve-driven hydraulic humanoid robots were receiving a great response at that time, we learned that hydraulic excavators use a completely different circuit, and that while it is a very tough system, improving energy efficiency is a major challenge. On the other hand, EHA (Electrostatic Hydraulic Actuator), a representative example of hydraulic hybrid technology that was gaining popularity in the industry at the time, seemed to be a very straightforward method of achieving both efficiency and precision because it uses pumps instead of gears. However, we were skeptical of the need for servo motors on each axis to cover 100% of the load. This is because it is difficult to balance power and size in multi-axis robots such as humanoids.
In 2013, our laboratory invented a new hydraulic composite circuit in collaboration with industry, which can achieve high speed, high load, and high precision at low cost by integrating a small servo motor-driven pump into a normal hydraulic open circuit, and demonstrated its effectiveness in a simple one-axis actuator. Based on this result, we are currently conducting several research projects aimed at improving multi-axis robots and various hydraulic machines.
Project 1: Hydraulic Hybrid Servo Press
New hydraulic circuit:H2SB (Hydraulic Hybrid Servo Booster)
It is an evolution of the booster circuit and closed circuit, which are widely known as basic hydraulic circuits, by combining only the best features of both circuits into a high-speed, high-precision servo circuit. It is a composite circuit(*) in which a servo motor-driven bi-directional pump (servo pump) is inserted into an open circuit consisting of a general-purpose valve bridge, and various equivalent circuits can be realized by different valves.
*PCT/JP2013/069900, US Patent 9458864
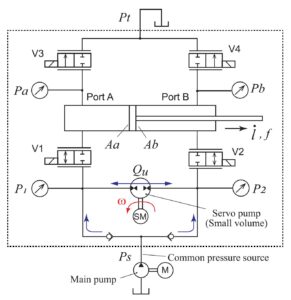
H2SB circuit embeds a small servo pump into a valve bridge (called Independent Metering Valve)
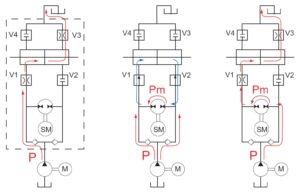
Operating modes of H2SB (Left: High speed mode; Center: Closed-circuit mode; Right: Boost mode)
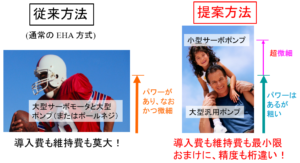
Cartoon of the proposed method
If a circuit is configured with a servo pump and a main pump with the same maximum pressure, the force will be twice that of the EHA within the speed range that the EHA can output, and the maximum speed and positioning accuracy that the main pump can output when unloaded will be the same as the EHA. However, this does not make the most of the characteristics of this circuit. The most important point of this invention is to use a servo pump that is sufficiently small compared to the cylinder capacity. By doing so, it is possible to easily obtain the high resolution of velocity and large force that are essential for robots, which cannot be achieved with a variable piston pump. Other research has not had this perspective. Another feature is that it can be "retrofitted" to conventional hydraulic equipment equipped with a pump and valves.
10-ton servo press
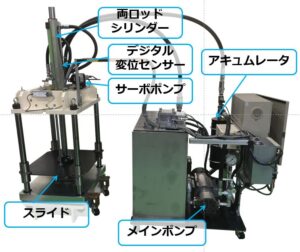
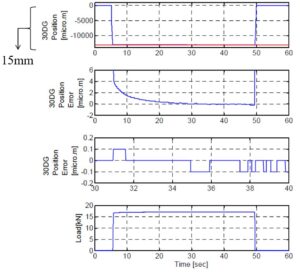
A 10-ton servo press equipped with a slide of 600x600 mm in size and 200 kg of weight, and a double-rod cylinder of 600mm in length
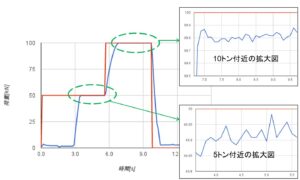
With the H2SB circuit and a simple PID controller, we have achieved high-speed motion of up to 1m/s, high load up to 100 kN, precise position control with 0.1 μm error, as well as the precise force control up to the sensor resolution. Now the classical controller is being replaced by optimal controllers.
Project 2: Hydraulic Hybrid Manipulator
Aiming to create a low-cost, tough general-purpose robot using a multi-axis hydraulic hybrid drive circuit, we constructed a planar three-axis manipulator for demonstration experiments. Since those robots which can control the joint torque are ideal plants in terms of control theory (see past research on humanoid robots, for example), we implemented joint torque control using pressure sensor feedback with small servo pumps. In the case of fluid actuators, high velocity resolution means high resolution of force control, so as mentioned above, using a small servo pump is important.
In the servo press study, a double-rod cylinder was used, making closed circuit operation easy, but in the case of single-rod cylinders used in excavators and many hydraulic equipment, the flow entering and leaving the servo pump is different, so the pressure balance is lost and the motor malfunctions. In fact, the EHA is equipped with a safety circuit for this purpose, but in the H2SB, it can be dealt with by using valves V3 and V4 on the outlet side. The system and control method of the hydraulic manipulator, including such a method, are summarized in an IEEE RAL paper published in IEEE RAL 2019.
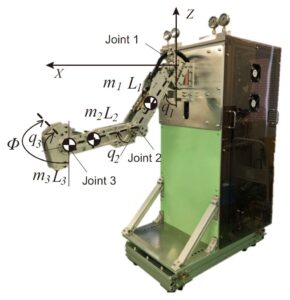
A three-axis manipulator of the weight 12.8 kg and length 1.2 m
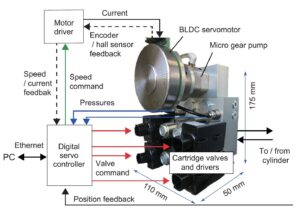
Realization of small H2SB using a 0.18 cc gear pump, 90 W brushless DC motor, and cartridge valves
New hydraulic circuit: MHSB (Modular Hydraulic Servo Booster)
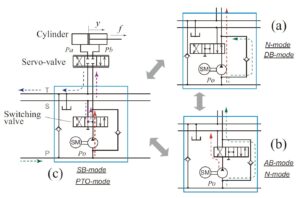
The H2SB circuit mentioned above emphasizes low cost, but the dynamic characteristics of the servo valve are very attractive and are difficult to discard even if the energy efficiency is somewhat poor. Therefore, we proposed the modular hydraulic servo system MHSB (Modular Hydraulic Servo Booster) aimed at implementation in multi-axis robots. This circuit has a modular structure that is upwardly compatible and can be retrofitted as a manifold at the midpoint of a normal hydraulic circuit while still utilizing the servo valve, which is essential for realizing a highly responsive multi-axis robot. The pressure fluid generated by the servo pump is consumed by the servo valve at the end, so the robot improves only its energy efficiency without sacrificing responsiveness.
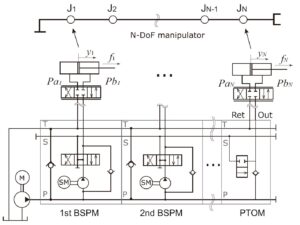
MHSB circuit diagram for N-joint manipulator
As the circuit diagram shows, this circuit is composed of a basic module called BSPM (Boost Servo Pump Module) and an optional module called PTOM (Power-Take-Off Module), and can be stacked as many as necessary. Here, BSPM is composed of a servo pump, a switching valve, and a check valve, while PTOM uses only a switching valve and a check valve. On the other hand, PTOM is applied to an axis that usually operates at low pressure and rarely operates at high pressure. Both have a P line (low pressure common flow path), a T line (return flow path), an S line (high pressure common flow path), and an Outlet/Return line, and only the Outlet/Return line is connected to the servo valve.
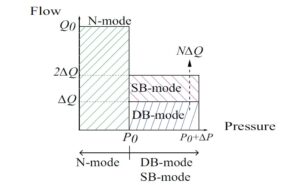
Maximum operation range of MHSB
The figure shows the range of pressure and flow rate that can be achieved in each operating mode when two BSPMs are used. When using N BSPMs that can deliver a maximum flow rate of ΔQ, a maximum flow rate of NΔQ can be supplied to one actuator at a high boosted pressure. Depending on the load situation of the robot, multiple servo pumps can work together to generate the pressure and flow rate required by multiple actuators on demand, making it ideal for driving multi-axis robots. Although this adds extra parts to the conventional servo valve drive circuit and increases the burden of maintenance, it is expected to save energy and have a long life because it is used at low pressure for a long period of time.
Possible mode transition of MHSB
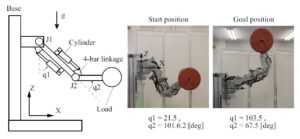
Weight lifting by a two-link robot arm driven by MHSB
This circuit can select multiple modes depending on the state of the switching valve and servo pump, so the control is complicated. Currently, we are applying this circuit to an articulated robot, and are researching an optimal control method that automatically determines the mode depending on the load. We are also considering how to apply this circuit to hydraulic modular robots, which are currently underway in other projects.
Project 3: Retrofitting hydraulic excavators
We are conducting research into the sophistication of excavators.
Force control using servo valves
This is a research project we started soon after introducing an excavator in 2011. Using a highly responsive servo valve and pressure feedback, we conducted trials to move the excavator's hand as flexibly as a robot. With the weight compensation control implemented as an example, we confirmed that the excavator's joints could be moved flexibly by a human hand.
If we think of the front part of the excavator as a planar robot, it is a three-axis redundant manipulator, so we successfully conducted an experiment combining the user's Joystick operation with force control using the control theory of redundant manipulators.
Retrofitting used hydraulic excavators
In response to the results of the hydraulic hybrid servo press mentioned above, we are conducting trials to integrate the H2SB into the excavator's drive circuit. The purpose is to obtain high positioning accuracy by using a retrofit circuit, in other words, to robotize it by retrofitting. It may be possible to approach the target roughly and quickly in open circuit mode, position it accurately in closed circuit mode, and finally perform the work forcefully in booster mode. We are conducting research from both the perspectives of automatic control and remote operation by an operator.
Project 4: Air-Hydraulic Servo Press (AHSP)

Operation of air-hydraulic press

3-ton AHSP
Position control experiment on 3-ton AHSP

10-ton AHSP
Force control experiment on 10-ton AHSP
As the data from the positioning control experiment shows, precise pressurization is possible using only air. In addition to hydraulic oil, tap water can also be used as the liquid. Since the air drive is explosion-proof, it can also be used in environments where fire is undesirable. These results are being utilized in our water hydraulic robots.
Reference
- Kengo Oda, Haruchika Otani, Sangho Hyon, "Optimal Motion Planning and Multimodal Control of MHSB for Hydraulic Manipulators", IEEE/ASME Transactions on Mechatronics, vol.30, no.4, pp. 3063-3071, 2025.
- K. Oda, H. Otani and S. Hyon, "Optimal trajectory planning and mode switching for manipulator driven by modular hydraulic servo booster," JFPS International Symposium on Fluid Power, 2A1-03, Hiroshima, Oct 24, 2024.
- S. Hyon and T. Kai, "Hydraulic servo booster for serially configured modular robots", IEEE International Conference on Robotics and Automation (ICRA), 2022, pp.11438-11444.
- S. Hyon, Y. Taniai, K. Hiranuma, K. Yasunaga, and H. Mizui, “Overpressure Compensation for Hydraulic Hybrid Servo Booster Applied to Hydraulic Manipulator,” IEEE Robot. Autom. Lett., vol. 4, no. 2, pp. 942–949, 2019.
- K. Suzumori, S. Hyon, C. Semini, J. Mattila and T. Kanda, Special Issue on ‘New Hydraulic Components for Tough Robots’, Advanced Robotics, 32:9, 457, 2018. DOI: 10.1080/01691864.2018.1466427
- S. Hyon, S. Tanimoto, and S. Asao, “Toward compliant, fast, high-precision, and low-cost manipulator with hydraulic hybrid servo booster,” in Proceedings - IEEE International Conference on Robotics and Automation, 2017, pp. 39–44.
- S. Hyon and S. Tanimoto, “Joint Torque Control of a Hydraulic Manipulator With Hybrid Servo Booster,” in The 10th JFPS International Symposium on Fluid Power, 2017.
- S. Hyon, W. Li, and Y. Mori, “Realization of Fast 10-Ton Servo Press Using Hydraulic Hybrid Servo Booster,” The 10th JFPS International Symposium on Fluid Power 2017, 2017.
- S. Hyon, F. Noda, T. Nomura, H. Kosodo, Y. Mori, and H. Mizui, “Hydraulic Hybrid Servo Booster and application to servo press,” in The 9th JFPS International Symposium on Fluid Power, 2014, Matsue, pp.158-162.
- K. Inoue, T. Yoneda, and S. Hyon, “Joint torque control by pressure feedback on hydraulic excavator for robotic application,” in The 9th JFPS International Symposium on Fluid Power, 2014, Matsue, pp.297-304.
2025/10/26