

Compliant Hydraulic Humanoids
Development and Control of Compliant, Tough, Humanoid Robot of Life-Sized
Research topics
- Design and manufacture of life-size humanoid robots
- Development of electric hydraulic power units
- Joint servo systems (position, speed, torque control)
- Whole-body force control (contact force control)
- Walking on uneven ground, fall avoidance control
- Application to whole-body motor learning
Rough Terrain Walking of Humanoid Robot H1T by Optimal Contact Force Control (IEEE-RAS Humanoids2018)
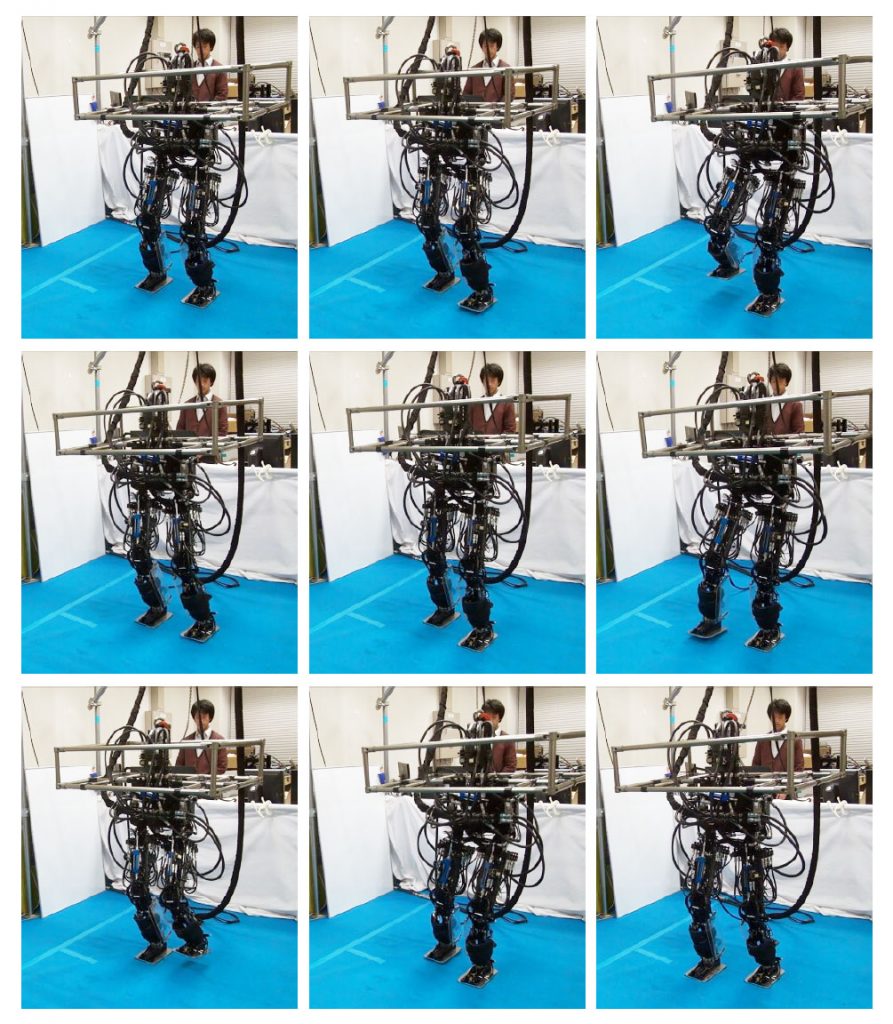
Quasi-dynamic walking of humanoid robot H1T (IFPEX2017)
2025/10/26