

スマート油圧ロボット
高効率・高性能・低コストなスマート油圧ロボットの開発
イントロ:高性能な遠隔操作ロボットに向けて
プロジェクト1:油圧ハイブリッドサーボプレス
プロジェクト2:油圧ハイブリッドマニピュレータ
プロジェクト3:油圧ショベルのロボット化
プロジェクト4:エアハイドロサーボプレス
発表論文
イントロ:高性能な遠隔作業ロボットに向けて
従来の製造現場に加え、市街地や沿岸、山地を含む屋外環境、そして人が侵入し難い水中、宇宙、原子力プラント、災害現場などの極限環境において、直感的な遠隔操作で精密に作業や点検ができるロボットが待望されています。その意味で、性能的には産業ロボットと土木建設機械のちょうど中間レベルに位置し、頑丈で使いやすいロボットを低コストに実現することは極めて重要な課題です。そこで私たちは、新しい油圧回路を利用した低コストで多機能なロボットの実現を目指しています。
この研究の始まりは2011年です(玄が大学に移籍して1年後)。サーボ弁駆動の油圧ヒューマノイドロボットが大きな反響を呼ぶ中で、屋外作業で活躍している油圧ショベルはこれとは全く別の回路を使っていて、非常にタフなシステムでありながら、エネルギー効率の改善が主要課題であることを知りました。一方、当時産業界で盛り上がりを見せていた油圧ハイブリッド技術の代表例であるEHA(電気静油圧アクチュエータ)は、ポンプをギヤ代わりに使うため、効率と精度を両立する非常に素直な方法に見えましたが、負荷を100 % カバーするサーボモータが各軸に必要となることに疑問を感じました。ヒューマノイドのような多軸ロボットではパワーとサイズのバランス取りが困難になるためです。
そこで当研究室では2013年、通常の油圧開回路に小型サーボモータ駆動ポンプを回路的に融合することにより、高速・高負荷・高精度を低コストで達成可能な新しい油圧複合回路を産学連携で発明し、簡単な1軸のアクチュエータにおける有効性を実証しました。この成果を受けて、多軸ロボットや各種油圧機械の高度化に向けた研究プロジェクトを複数展開しています。
プロジェクト1 油圧ハイブリッドサーボプレス
新油圧回路1:H2SB (Hydraulic Hybrid Servo Booster)
基本油圧回路として広く知られている増圧回路と閉回路を、両方の良い特徴だけを組み合わせて高速・高精度サーボ用回路として進化させたものです。汎用バルブブリッジからなる開回路にサーボモータ駆動の両回転ポンプ(サーボポンプ)を挿入した複合回路※となっており、バルブの選び方によって様々な等価回路を実現可能です。
※PCT/JP2013/069900, US Patent 9458864
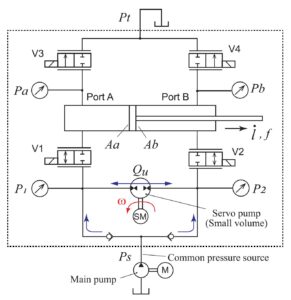
図:独立した流量比例弁のブリッジ回路(Independent Metering Valveとも呼ばれる)を用いたH2SBの実現例
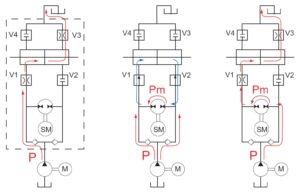
図:H2SBの動作説明(左:高速モード;中央:閉回路モード;右:増圧モード)
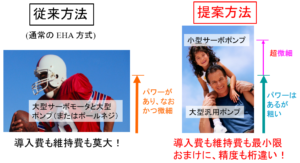
図:本技術のイメージ
最高圧力が同じサーボポンプとメインポンプとで回路を構成した場合、EHA が出せる速度範囲内ではEHA の2 倍の力、無負荷時にはメインポンプが出せる最高速度、位置決め精度はEHA と同じになります。しかし、これではこの回路の特徴を活かせません。
本発明の最も重要なポイントは、シリンダ容量に比べて十分小さいサーボポンプを用いるところにあります。そうすることで可変ピストンポンプでは達成しえない、ロボットに不可欠な速度分解能と大きい力が容易に得られるのです。他の研究にはこの視点がありませんでした。また、ポンプとバルブを備えた油圧機器に「後付け」できることも特徴と言えます。
10トンサーボプレス
サーボプレスを模した4本柱の垂直スライダーを構築しました(モリ工業製作)。メインポンプははすばギヤポンプ(住友精密)とIPMサーボモータ(ダイキン工業)で構成されており、アキュムレータに圧液をチャージして初速を出します。H2SBブロックは0.8ccのピストンポンプ(タカコ社)と800WのACサーボモータ(Panasonic)、カートリッジ弁を備えたマニホールドブロック(東京計器)で構成されています。
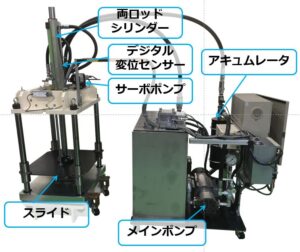
図:10トン油圧ハイブリッドサーボプレス(スライド寸法:600x600mm、 スライド質量:200kg、ストローク:600mm)
H2SB回路と簡単なPID制御により、高速動作(最高1m/s )、 高推力(100 kN )、 精密位置制御(0.1μm )、 精密荷重制御(センサ分解能まで)を達成しています。現在、回路モードの自動切替も含む最適制御の研究を展開しています。
※本研究は油空圧機器技術振興財団、JST A-Step シーズ顕在化「革新的油圧ハイブリッドサーボ技術による高速精密サーボプレスの試作」の助成を受けました。
プロジェクト2 油圧ハイブリッドマニピュレータ
多軸油圧ハイブリッド駆動回路によりローコストでタフな汎用ロボットを目指し、実証実験用の平面3軸マニピュレータを構築しました。最近流行りの協働ロボットの事例を持ち出すまでもなく、関節トルクを制御できるロボットは制御理論的には理想的なプラントですが(例えば過去のヒューマノイドロボットの研究を参照)、本研究では圧力センサフィードバックによる関節トルク制御を実装しています。流体アクチュエータの場合、速度分解能が高いことは力制御の分解能も高いことを意味しますので、上述したように、小型のサーボポンプを用いることが重要なポイントになります。
サーボプレスの研究では両ロッドシリンダを用いていたために閉回路動作が容易でしたが、ショベルや多くの油圧機器に用いられている片ロッドシリンダの場合、サーボポンプに入る流量と出る流量が異なるため、圧力バランスが崩れることでモータが動作不良を起こします。実はEHAにはそのための安全回路が備わっているのですが、H2SBでは出口側のバルブV3、V4を用いて対応することができます。このような対応方法も含めて油圧マニピュレータのシステムと制御方法についてまとめたものが2019年出版のIEEE RAL論文です。
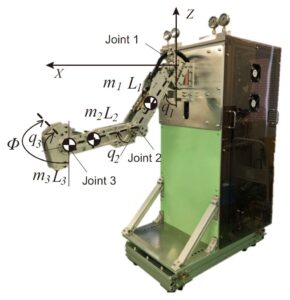
図:3軸マニピュレータ( 腕部質量:12.8 kg、 腕部長さ:1200 mm)
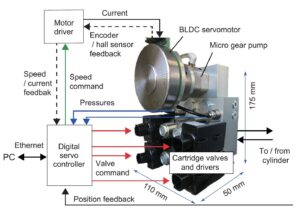
図:H2SB回路の外観(90Wモータを使用)
H2SB回路と単純なPID制御によって、可搬重量: 20kg (実績)、 手先最大速度:2m/s 以上、 関節トルク制御、 手先位置決め精度:0.5mmを達成しました。
※本研究はJST ImPACT タフ・ロボティクス・チャレンジならびに科研費基盤研究から助成を受けました。
新油圧回路2:MHSB (Modular Hydraulic Servo Booster)
上述のH2SB回路はローコスト性を重視しましたが、サーボ弁が有する動特性は大変魅力的で、エネルギー効率が多少悪いとしても、捨てがたいものがあります。そこで、多軸ロボットへの実装を目指したモジュラー型油圧サーボシステムMHSB (Modular Hydraulic Servo Booster) を提案しました。本回路は、高応答な多軸ロボットを実現するために欠かせないサーボ弁を活かしたまま、通常の油圧回路の中間地点にマニホールドとして後付け可能な、上位互換かつモジュラー構造を有する回路構成になっています。サーボポンプで生成された圧液は末端のサーボ弁で消費されるため、ロボットは応答性を犠牲にせずにエネルギー効率だけが改善されます。
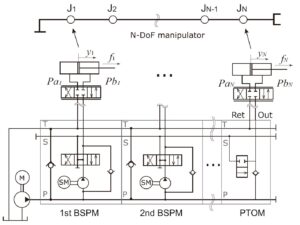
図:MHSBの回路図(N軸マニピュレータ適用)
回路図が示すように、本回路はBSPM (Boost Servo Pump Module) と呼ぶ基本モジュールと、PTOM (Power-Take-Off Module) と呼ぶオプションモジュールから構成され、必要なだけスタックして使用することができる。ここでBSPM はサーボポンプ、切換弁、チェック弁から構成され、PTOM は切換弁とチェック弁のみを用います。一方、PTOM は通常は低圧で動作し、ごくまれに高圧で動作する軸に適用します。どちらにもP ライン(低圧共通流路)、T ライン(戻り流路)、S ライン(高圧共通流路)、Outlet/Return ラインがあり、Outlet/Return ラインだけがサーボ弁に接続されています。
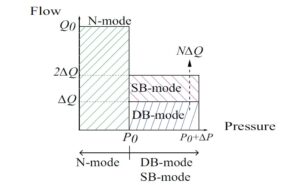
図:MHSBの動作範囲
動作範囲図には2 台のBSPM を用いた場合に各動作モードで発揮できる圧力と流量の範囲が示されています。最大ΔQ の流量を吐き出せるN 個のBSPM を用いる場合、増圧された高い圧力で1 つのアクチュエータに最大NΔQ の流量を供給することができます。ロボットの負荷の状況に応じて、複数のサーボポンプが協調しながら複数のアクチュエータに必要な圧力と流量をオンデマンドに生成することができるので、多軸ロボットの駆動に好適です。従来のサーボ弁駆動回路に余計なパーツが追加される形となり、保守管理の負担も増えますが、低圧で利用する期間が長いため、省エネ化と長寿命化が期待できます。
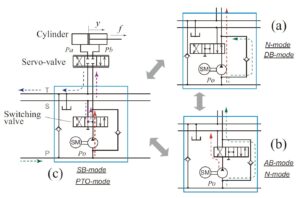
図:MHSBのモード遷移図
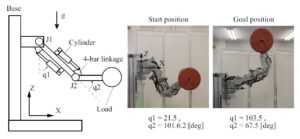
図:ロボットアームによるウェイトリフティング
本回路は切替弁とサーボポンプの状態によって複数のモードが選べるので制御は複雑になります。現在、本回路を多関節ロボットに適用し、負荷に応じて自動的にモード等が決まる最適制御法について研究を進めています。また、他のプロジェクトで進行中の油圧モジュラーロボットへの適用方法も検討中です。
※本研究は科研費基盤研究から助成を受けています。
プロジェクト3 油圧ショベルのロボット化
ショベルの高度化研究を行っています。
サーボ弁を用いた力制御
2011年にショベルを導入してすぐに取り組んだ研究です。高応答なサーボ弁と圧力フィードバックにより、ショベルの手先をロボットのように柔軟に動かすトライアルを行いました。例として実装した自重補償制御では、人の手でショベルの関節が柔らかく動かせることを確認しました。
ショベルのフロント部を平面ロボットと見立てれば3軸の冗長マニピュレータですので、冗長マニピュレータの制御理論を用いて、ユーザーのJoyStick操作と力制御を組み合わせる実験に成功しました。
中古油圧ショベルのレトロフィット
上述の油圧ハイブリッドサーボプレスの結果を受けて、H2SBをショベルの駆動回路に融合するトライアルを行っています。その目的は、後付回路によって高い位置決め精度を得ること、つまりレトロフィットによるロボット化です。開回路モードで荒く高速に対象物にアプローチし、閉回路モードで精度よく位置決めし、最後に増圧モードで力強く作業を行うことが実現するかもしれません。自動制御とオペレータによる遠隔操作の両面から研究しています。
プロジェクト4 エアハイドロサーボプレス(AHSP)
空・油変換器および空・油増圧器を利用する従来のエアハイドロアクチュエータ(たとえばモリ工業社製のMORIX)にサーボ弁を用いたフィードバック制御を導入することで、高い位置決め精度と加圧精度を達成するエアハイドロサーボブースターを発明しました。さらに、空・油増圧器の代わりに小型サーボモータ駆動ポンプを用いるタイプのサーボプレスを開発しました。
※特許第6164528 号, 特願2013-236972

図:エアハイドロプレスの動作イメージ図

図:エアハイドロサーボプレス(3トン)

図:エアハイドロサーボプレス(10トン)
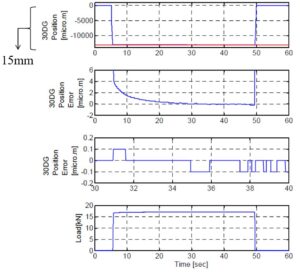
図:位置決め制御の例(3トンAHSP)
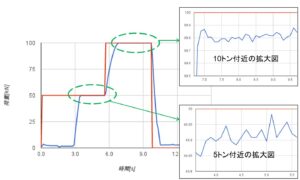
図:荷重制御の例(10トンAHSP)
位置決め制御実験のデータが示すように、エアだけで精密加圧が可能です。液体としては作動油の他に水道水が利用可能です。エア駆動は防爆ですので火気を嫌う雰囲気での使用も想定されます。この成果は当研究室の水圧マニピュレータプロジェクトに活かされています。
※本研究は有限会社モリ工業(静岡市)との共同研究で、一部は「ものづくり中小企業・小規模事業者試作開発等支援補助金」から助成を受けています。
学生の声
麻生さん(写真右;当時マスター2年生)
- 1. 何を研究していますか?
「油圧ハイブリッサーボ機器の状態推定とオンラインパラメータ調整がテーマです。油圧系に含まれる未知要素モデルを同定することで高性能化を目指します。サーボ弁に劣らぬ性能を安価に実現出来たらいいなと思っています」。
2. 研究のポイントは何ですか?
「油圧回路の性能を100% 発揮するために専用サーボコントローラ(マイコンと電子回路) の設計を行う点です。また、油圧系特有の非線形性を考慮した制御は高速演算が要となります。全体の制御系にどのように実装するかが大きなポイントとなります」。
3. 将来の目標は?
「直面した問題を多方面からのアプローチで解決できるエンジニアです」。
発表論文
-
青山敦一, 織田健吾, 玄相昊, 液圧共有が可能な電動油圧式モジュラー移動ロボットのコンセプト検証, 第43回日本ロボット学会学術講演会, 2025.
-
鈴村拓心, 織田健吾, 玄相昊, "モジュラー油圧回路MHSBを搭載した冗長マニピュレータの最適軌道計画", 第43回日本ロボット学会学術講演会, 2025.
- Kengo Oda, Haruchika Otani, Sangho Hyon, "Optimal Motion Planning and Multimodal Control of MHSB for Hydraulic Manipulators", IEEE/ASME Transactions on Mechatronics, vol.30, no.4, pp. 3063-3071, 2025.
- 爾英慈, 玄相昊, 大流量弁と定流量小型サーボポンプの各流量特性を考慮した直動油圧アクチュエータの最適制御, SICE関西支部・システム制御情報学会シンポジウム, 2025.
-
K. Oda, H. Otani and S. Hyon, "Optimal trajectory planning and mode switching for manipulator driven by modular hydraulic servo booster," JFPS International Symposium on Fluid Power, 2A1-03, Hiroshima, Oct 24, 2024.
- 爾英慈, 玄相昊, 100kgの慣性負荷を駆動する電気油圧ハイブリッドアクチュエータの最適制御によるPTP制御, 第42回日本ロボット学会学術講演会, 2024.
- 小野颯之介. 玄相昊, 織田健吾, 後付け小型サーボポンプによる油圧ショベルのレトロフィット, 第42回日本ロボット学会学術講演会, 2024.
- 織田健吾, 大谷隼史, 玄相昊, モジュラー油圧回路MHSBを搭載したマニピュレータの最適軌道計画, 第42回日本ロボット学会学術講演会, 2024.
- S. Hyon and T. Kai, "Hydraulic servo booster for serially configured modular robots", IEEE International Conference on Robotics and Automation (ICRA), 2022, pp.11438-11444.
- 甲斐 友朗,橋本 岬,玄 相昊,"油圧回路MHSBによる3軸マニピュレータのトルク制御と位置追従制御",第23回計測自動制御学会システムインテグレーション部門講演会, 2022, pp 2323-2326.
- 甲斐友朗,玄相昊,"モジュラー油圧回路MHSBによる2リンクマニピュレータのトルク制御", 第22回システムインテグレーション部門講演会, 2021.
- 甲斐友朗 玄相昊, “新油圧回路H2SB+による単関節アームの位置軌道追従,” in 日本フルードパワーシステム学会講演会 春季大会, 2021, pp. 82–84.
- 甲斐友朗, 水井晴次, 玄相昊, “多軸ロボットのための油圧ハイブリッドサーボシステムH2SB+,” in 第38回日本ロボット学会学術講演会, 2020.
- S. Hyon, Y. Taniai, K. Hiranuma, K. Yasunaga, and H. Mizui, “Overpressure Compensation for Hydraulic Hybrid Servo Booster Applied to Hydraulic Manipulator,” IEEE Robot. Autom. Lett., vol. 4, no. 2, pp. 942–949, 2019.
- K. Suzumori, S. Hyon, C. Semini, J. Mattila and T. Kanda, Special Issue on ‘New Hydraulic Components for Tough Robots’, Advanced Robotics, 32:9, 457, 2018. DOI: 10.1080/01691864.2018.1466427
- 玄相昊, “安価な汎用部品を用いた油圧駆動回路とロボットへの応用,” 計測と制御, vol. 57, no. 11, pp. 769–774, 2018.
- 谷合祐樹,谷本純一,玄相昊, “油圧ハイブリッドマニピュレータのトルク制御のためのリリーフ制御,” in 第19回計測自動制御学会システムインテグレーション部門講演会, 2018, pp. 2011–2013.
- S. Lee,谷合裕樹,玄相昊, “油圧ハイブリッドマニピュレータの試作(第 2 報):旋回軸の追加とシステム再構築,” in 第19回計測自動制御学会システムインテグレーション部門講演会, 2018, pp. 2008–2010.
- S. Hyon, S. Tanimoto, and S. Asao, “Toward compliant, fast, high-precision, and low-cost manipulator with hydraulic hybrid servo booster,” in Proceedings - IEEE International Conference on Robotics and Automation, 2017, pp. 39–44.
- S. Hyon and S. Tanimoto, “Joint Torque Control of a Hydraulic Manipulator With Hybrid Servo Booster,” in The 10th JFPS International Symposium on Fluid Power, 2017.
- S. Hyon, W. Li, and Y. Mori, “Realization of Fast 10-Ton Servo Press Using Hydraulic Hybrid Servo Booster,” The 10th JFPS International Symposium on Fluid Power 2017, 2017.
- 玄相昊, “低コストで多機能な油圧ハイブリッドロボット,” フルードパワーシステム, pp. 323–326, 2017.
- 玄相昊, “油圧ハイブリッドサーボによる新しいロボットの提案,” in 第34回日本ロボット学会学術講演会, AC3E2-01, 山形, 2016.
- 谷本純一,真下瑛一,玄相昊,"油圧ハイブリッドマニピュレータの試作,"第34回日本ロボット学会学術講演会, AC2U2-03, 山形, 2016.
- 麻生翔太, 野村敏行, 玄相昊, “油圧ハイブリッドサーボコントローラの開発と 片ロッドスライダーへの適用,” in 第34回日本ロボット学会学術講演会, AC1X2-08, 山形, 2016.
- 玄相昊, 野村敏行, 森悦宏, “油圧ハイブリッドサーボブースターによる10トンプレスの精密制御,” in ロボティクス・メカトロニクス講演会, 2015.
- 森田圭亮, 野村敏行, 玄相昊, "増圧による精密油圧サーボと空気圧サーボ技術," ロボティクス・メカトロニクス講演会, 2015(ポスター発表).
- 玄相昊, ヒューマノイドロボットから精密プレスまで:油圧の新しい使い方, 第59回システム制御情報学会研究発表講演会(SCI'15), 中央電気倶楽部(大阪), 2015.
- S. Hyon, F. Noda, T. Nomura, H. Kosodo, Y. Mori, and H. Mizui, “Hydraulic Hybrid Servo Booster and application to servo press,” in The 9th JFPS International Symposium on Fluid Power, 2014, Matsue, pp.158-162.
- K. Inoue, T. Yoneda, and S. Hyon, “Joint torque control by pressure feedback on hydraulic excavator for robotic application,” in The 9th JFPS International Symposium on Fluid Power, 2014, Matsue, pp.297-304.
- 玄相昊, 新しい油圧ハイブリッドサーボと油圧プレスへの応用, 油空圧技術, vol.53, no.1, pp.14-17, 2014.
- 玄相昊,野田史男,森悦宏,水井晴次, エアハイドロサーボ(第1報):原理とシミュレーション, 平成26年春季フルードパワーシステム講演会講演論文集, pp.28-30, 2014年5月29日, 東京.
- 玄相昊,野田史男,森悦宏,水井晴次, エアハイドロサーボ(第2報):サーボプレスへの適用, 平成26年春季フルードパワーシステム講演会講演論文集, pp.31-33, 2014年5月29日, 東京.
- 井上皓平, 米田知生, 前原太平, 玄相昊, “油圧ショベルの力制御と零化空間を利用したオペレータ操作,” in 第31回日本ロボット学会学術講演会, AC1H3-06, 2013年9月4日, 東京.
- 玄相昊, 野田史男, 井上皓平, 米田知生, "ブースト型純油圧ハイブリッドによるサーボショベルの提案," 第31回日本ロボット学会学術講演会講演予稿集, AC1H3-05, 2013年9月4日, 東京.
- 玄相昊, 野田史男, 森悦宏, 小曾戸博, 水井晴次, “新しい純油圧ハイブリッド サーボ(第1報): 原理と油圧プレスへの適用,” in 平成25年春季フルードパワーシステム講演会講演論文集, 2013, pp. 43–45.
- 玄相昊, 粂内健吾, 柔軟な力制御によるミニショベル掘削作業の知能化に関する調査研究, 建設施工と建設機械シンポジウム, 239-247, 2012.11,東京.
2025/10/26