

モジュラー油圧ロボ
再構築可能なモジュラー油圧ロボットの開発
コンセプト
我々が置かれた社会経済環境と自然環境の現状を踏まえると,農林水産,土木建設,物流,インフラ保守,災害対応など,基本的に人が立ち入りがたい現場で稼働する作業用ロボットのニーズは増加する一方である.様々な新しいニーズに合わせた汎用性を有し,導入コストと運用コストをトータルに低減できる新しいロボットソリューションが求められる.そのためのチャレンジが「油圧モジュラーロボット」である.
学術界には既に,再構築可能なロボット(reconfigurablerobots)や,自律分散ロボット(self-organizedrobots)という分野が存在する.先駆的な研究を筆頭に,様々な概念,機構,アルゴリズムが提案されてきた.これは,独立に動く単機能ロボットが複数組み合わさって,不定形の環境に対して形状を適応しながら,集合体として何らかの作業目的をフレキシブルに達成する知的なロボットシステムと定義できる.とくに冒頭に述べたニーズにおいては,適材適所の構造選択と配置の自由度,機動性と可搬性,故障時の代替,製造と保守,再利用の容易さなど,設計・製造・運用・廃棄に至る全てのプロセスで多くの利点を有すると考えられる.
過去の多くの研究では,均質な物体が無数に集まって,集合体となって何らかの機能性構造を形成したり移動したりする概念やシミュレーション例が示されており,洗練されたデザインの自律モジュラーロボットの開発事例も存在する.しかし,重力から解放されて動作する宇宙用マニピュレータを例外として,冒頭で述べたような地上の様々な環境で作業を代替できるようなモジュラーロボットの実現例はない.その原因はアクチュエータの発揮力によるものと考えている.
そこで我々は,図 に示すようなヘビーデューティ用モジュラーロボットを目指し,油圧駆動に着目して2018年度から研究を進めてきた.我々の取り組みにおいては,AIによる高度な自律分散知能の実現よりも,ハードウェアの早期実現に軸足を置いている.とくに,油圧特有の頑健さとハイパワーに加え,油圧回路と配管による変幻自在な動力集配機能をモジュラーロボットの運用に最大限に生かすことにフォーカスする.
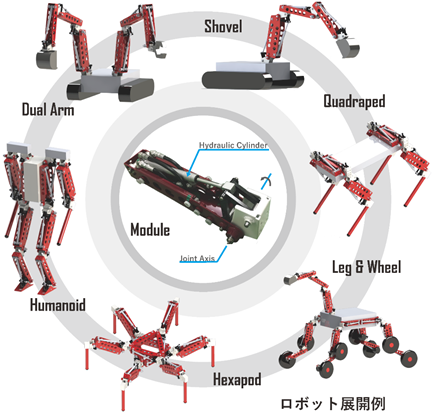
モジュラーロボットにける油圧の利点をいくつかあげる:
- 衝撃に強く,全天候型で,比較的安価に製造可能
- 小型ポンプを用いれば速度は落ちるが小型モータで大きい力が出せる
- 圧力による力の監視と制御が可能である
- 脱着を油圧によって達成できる
- 増圧と合流によって軸間でパワーを融通できる
したがって,油圧モジュラーロボットがある目的に最適設計された非モジュラー油圧ロボットに対してどの程度優位なのか?を明らかにすることが学術的な貢献となる.
実施例
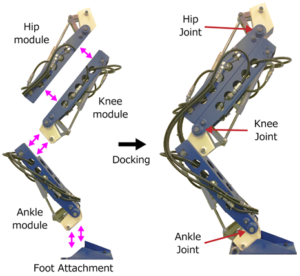
1号機と脚ロボットの構成例
1号機とマニピュレータの構成例
「変形ダボ式」の脱着機構を有する2号機
発表論文
-
織田健吾, 青山敦一, 玄相昊, "液圧共有が可能な電動油圧式モジュラー脚車輪ロボットのための要素実験", 2025年秋季フルードパワーシステム講演会講演論文集, pp.160-162, 2025.
-
安藤了, 荒川拓也, 弘中剛史, 玄相昊, "油圧モジュラーロボットのための軽量・小型コネクタ", 第43回日本ロボット学会学術講演会, 2025.
- S. Hyon, R. Ando, E. Sono, S. Sugimoto and Y. Saitou, "Hyblock: Hardware Realization and Control of Modular Hydraulic Robots with Dowel Connectors," 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 3609-3615, doi: 10.1109/ICRA57147.2024.10611336.
- 安藤了, 荒川拓也, 弘中剛史, 玄相昊, "油圧モジュラーロボットのためのジェンダーレスな油圧・電気マルチコネクタの設計",
第42回日本ロボット学会学術講演会, 2024. - 國方碩人, "玄相昊, 非円形プーリーを用いたHAM駆動モジュラーロボットの設計", 第42回日本ロボット学会学術講演会, 2024.
- 玄相昊, 鹿野貴裕, 國方碩人, 荒川拓也, 齊藤靖, "油圧モジュラーロボットHyblockのためのモジュラー油圧回路と動的再構築方法の提案",第41回日本ロボット学会学術講演会, 2023.
- 國方碩人, 胡木康晴, 荒川拓也, 齊藤靖, 織田健吾, 玄相昊, "マニピュレータを用いた油圧式モジュラーロボットの合体制御'', ロボティクス・メカトロニクス講演会, 2P2-C21, 2023.
- 玄相昊, "サステナブルロボティクスのための油圧再考'', カヤバ技報, vol.65, 2022.
- 胡木康晴,佐藤勇希弥,鹿野貴裕,上倉定幸,斎藤靖,福沢祐二,玄相昊, "2関節油圧モジュラーロボットの試作と合体制御", 第22回システムインテグレーション部門講演会, 2021.
- 佐藤勇希, 杉本隼一, 上倉定幸, 齊藤靖, 玄相昊, “変形ダボで結合する単関節油圧モジュラーロボットの設計,” 第21回システムインテグレーション部門講演会, 2020, pp. 882–885.
- 杉本隼一, 上倉定幸, 齊藤靖, 玄相昊, “単関節モジュールを用いた分解組立が容易な油圧ロボットの開発,” 第37回日本ロボット学会学術講演会, 2019.
2025/12/15