

多脚歩行ロボット
多脚型の不整地歩行ロボット/ローバーの開発と制御
当研究室では、2012年以降、油圧ヒューマノイドロボットで培った全身運動制御技術を多脚ロボットや車両系ロボットに展開しています。その狙いは不整地を縦横無尽に移動可能な「モバイルベース」の実現です。ベースの上にマニピュレータなどの既存のパワーツールを搭載するだけで、構造物の解体や組み立て、資材や瓦礫の運搬や除去など様々な力仕事を支援することができます。それには下記の特徴が重要と考えています。
(A) 不整地や傾斜地でのベース位置・姿勢の維持
(B) 凹凸路面、急斜面への適合
(C) 耐衝撃性・柔軟性
ここで(A) は、地形の影響を受けずに工具やマニピュレータ等の作業ツールの作業空間を確保することです。(B) は、極端な凹凸面や急斜面への運動学的、力学的適合性を考慮したものです。(C) は地形の突発的な変動による地面からの衝撃吸収を想定したものです(サスペンション機能)。この研究では、「関節トルク制御による全身運動制御技術」を導入し、路面形状や外乱などの変化に対して特別な外界センサを用いることなく、ベース・脚・車輪を協調動作させながら柔軟に対処することができます。従来の油圧とは異なる、新しい使い方と言えるでしょう。
油圧駆動4脚歩行ロボット
の多脚プロジェクトでは最初に、ヒューマノイド研究で開発した脚を使ったトルク制御油圧四脚ロボット RL-A1(高さ 1.1 m、重量 75 kg)を開発しました。このロボットは油圧動力源の搭載有無によって2つのハードウェアバージョンがあります。ロボットは脚1本に対し、股Roll関節、股Pitch関節、膝Pitch関節の3つの能動関節と、オプションとして足先に直動の受動関節を有しており、機体全体では計12または16自由度を有しています。
本ロボットは受動性ベースの制御フレームワークの実装により、不安定路面でのバランス能力に加え、ロボットが大きな外乱を受けても転倒せずに歩行を続けることができます。

HSL-A1(first appeared at IREX2013)

HSL-A1 with on-bord HPU (RSJ2016)
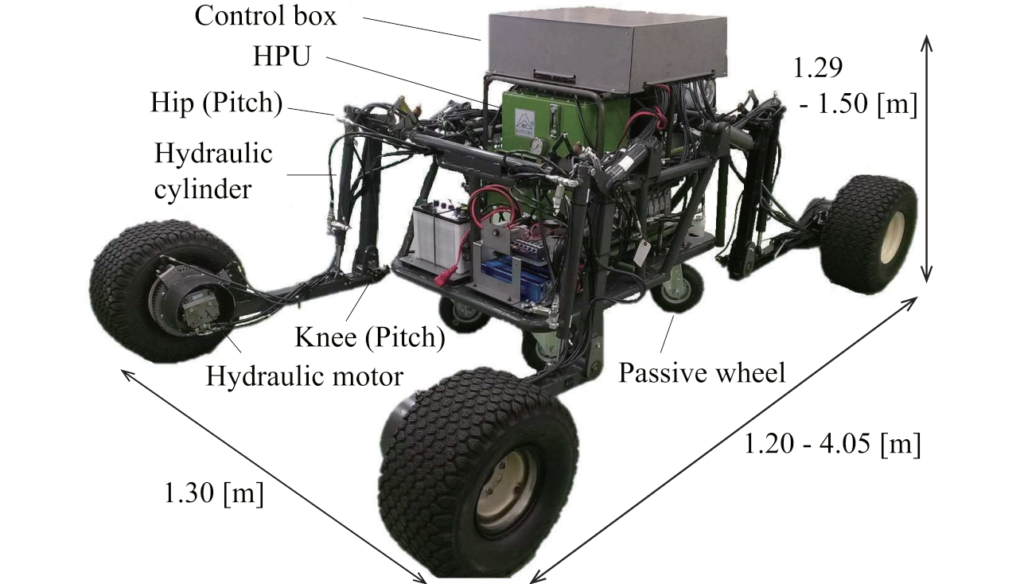
全油圧ローバー HYDROVER
農業用移動ロボットの基礎研究として株式会社クボタと共同研究している全油圧式のローバーです。
脚車輪ロボットは、車輪機構と脚ロボットの「いいとこどり」を狙ったロボットです。脚の利点とは、離散的な接地点選択と多様な動作姿勢です。また、車輪の利点とは、高効率性と高速移動能力です。
このロボットは、駆動輪を含めて全関節をトルク制御することができます。脚車輪ロボットは力制御による全身運動制御と相性が良く、地面への接地荷重とトラクションを任意に操作することができます。この特徴を活かせば、たとえば、制御不能になるスリップを発生させないよう、力加減をしながら走行することが可能となります。プロジェクト内で試作された2号機は1脚あたり3自由の関節と1つの駆動輪を持ち、合計16自由度、車重は331 kgです。脚機構は安価な比例弁、駆動輪はサーボ比例弁を採用しており、圧力センサからシリンダ内圧を計測することで全関節のトルク制御を達成しています。
Hydrover I (2015)
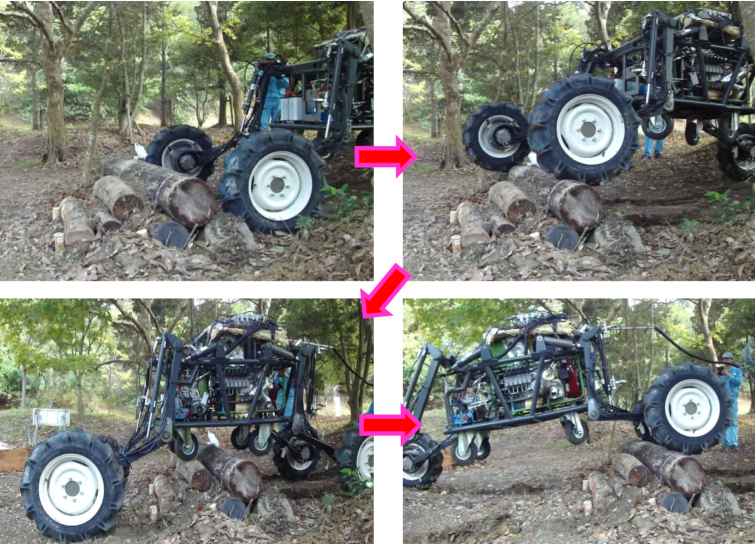
油圧ローバーによるログの乗り越えの様子(学内のフィールド実験場)
Hydrover II(2017)
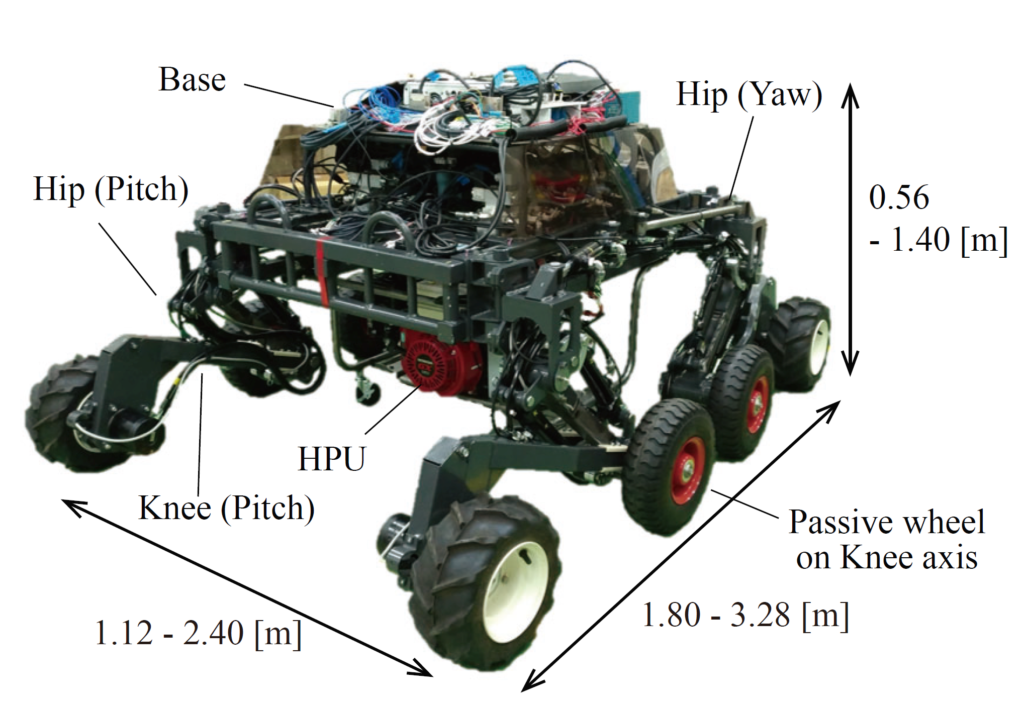
油圧4脚 + 電動2輪の脚車輪分離型ロボット CRAWHEL
不安定な地形での建設作業の支援に使える低重心のモバイルプラットフォームを目指して、脚と車輪が別々に胴体についている、いわゆる「脚・車輪分離型」のロボットを開発しています。この構造は外側に大きく張り出した脚によって広い支持領域を確保し、ベースの位置と姿勢を安定に保つのに適しています。この構造自体はよく知られたものですが、我々の持つ全身運動制御技術を組み合わせることで、新たな価値を生み出します。具体的には、軽量な脚機構は油圧による力制御が実装されているため、足場が急に崩落しても、素早く踏みなおすことで車体の転倒を防ぎます(図中d)。また、ロボット重心の真下にある車輪部分は、車体重量のほとんどの部分を支え、脚への負担を減らすことができます。車輪は単に平地における高速移動を実現するだけでなく、車輪を地面につけたままベースの制振や転倒回避動作をとったり、脚と強調しながら高い段差を昇降したりできます。試作した初号機の自由度は4脚2輪の計16で、全長は2m、重さは145kgです。屋外でも作業ができるよう、モバイル油圧パワーユニットを搭載しています。

脚車輪分離型 CRAWHEL(2015-)
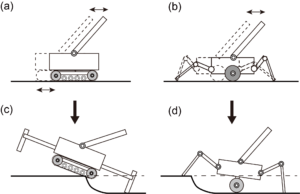
従来のアウトリガーを備えた建機(左) と提案するコンセプト機(右) の地盤が崩落した際の挙動比較イメージ.
Publications
- 織田健吾,松井俊樹,小野颯之介,玄相昊,“脚車輪型ロボットの冗長自由度を使ったモデル予測制御,”第28 回ロボティクスシンポジア, pp 52-55, 2023.
- 織田健吾, 井田裕介, 石川淳一, 平岡実, 玄相昊,“全身トルク制御可能な油圧ローバーの実現”,日本ロボット学会誌, vol. 40, no. 5, 2022.
- 織田健吾,松井俊樹,小野颯之介,玄相昊,“脚車輪型プラットフォームCRAWHELによる接触力と車輪接触点速度を同時決定可能な軌道追従制御,” 第23回計測自動制御学会システムインテグレーション部門講演会,pp 548-551, 2022.
- S. Hyon, Y. Ida, K. Ueda, J. Ishikawa, and M. Hiraoka, “Development of HYDROVER , a Torque-Controlled Hydraulic Rover,” Field and Service Robotics, Springer, 2021. (DOI: 10.1007/978-981-15-9460-1).
- K. Oda, Y. Yasui, Y. Kurose and S. Hyon, "Enhancement of a Leg-Wheel Mechanism by Hydraulics toward Compliantly Balancing Platforms for Heavy Duty Work,'' Advanced Robotics, Vol. 35, No. 23, PP. 1450-1467, 2021 DOI:10.1080/01691864.2021.1980102
- 織田健吾, 安井雄哉, 黒瀬裕一郎, and 玄相昊, “不整地作業用脚車輪型プラットフォームCRAWHELの開発,” in 第39回日本ロボット学会学術講演会, 2021.
- S. Hyon, Y. Ida, J. Ishikawa, and M. Hiraoka, “Whole-Body Locomotion and Posture Control on a Torque-Controlled Hydraulic Rover,” IEEE Robot. Autom. Lett., vol. 4, no. 4, pp. 4587–4594, 2019.
- 玄相昊, “油圧による柔軟で機動性の高い多脚ロボットの実現,” 日本ロボット学会誌, vol. 37, no. 2, pp. 150–155, 2019.
- 榊原康平, 井田裕介, 石川淳一, 平岡実, and 玄相昊, “駆動輪と受動輪を有する油圧式脚車輪ローバーの 最適接触力制御による4輪及び8輪スロープ走行,” in 第37回日本ロボット学会学術講演会, 2019.
- 井田裕介,石川淳一,平岡実,玄相昊, “油圧式ローバーの最適接触力分配による不整地適応,” in 第24回ロボティクスシンポジア講演論文集, 2019, pp. 112–113.
- 玄相昊,井田裕介,植田晃介,石川淳一,平岡実, “油圧式4脚4輪移動ロボットの全身運動制御,” in 第19回計測自動制御学会システムインテグレーション部門講演会, 2018, pp. 2014–2017.
- 織田健吾, 玄相昊, "油圧式4脚歩行ロボットRL-A1の対称歩行制御による転倒回避と歩行", ロボティクス・メカトロニクス講演会, 2017.
- 織田健吾,塚本泰光,玄相昊,"油圧式4脚歩行ロボットRL-A1 の自立化:パワーユニットの搭載",第34回日本ロボット学会学術講演会, 2016.
- 黒瀬裕一郎,安井雄哉,廣澤望,玄相昊,"油圧パワーユニット搭載型脚車輪ロボットRL-W1の開発",第34回日本ロボット学会学術講演会, 2016.
- 安井雄哉, 廣澤望, 黒瀬裕一郎, 玄相昊, "油圧式4脚ロボットRL-R1の機構設計と脚部の試作", ロボティクス・メカトロニクス講演会, 2015.
- 川端健太郎,西拓紀,鳥居裕貴,北浦誠人,兼松宏多,玄相昊,油圧式4脚歩行ロボット RL-A1 の開発,ロボティクス・メカトロニクス講演会, 2014.
- 西拓紀, 鳥居裕貴, 玄相昊, 柔軟な全身接触力制御による4脚歩行ロボットの不整地転倒回避, 第14回システムインテグレーション部門講演会(SI2013), pp.1291-1296, 2013.
- 西拓紀, 富永英介, 鳥居裕貴, 玄相昊, 油圧式4脚走行ロボットの床反力制御と姿勢制御, 第55回自動制御連合講演会, pp.727-730, 2012.
2025/10/30