

(工事中) 柔靱!2足歩行ヒューマノイドロボット
本ページは工事中です。2号機の成果とともにアップデートする予定です。
しなやかで強靭な等身大ヒューマノイドロボットの開発と運動制御
研究テーマ
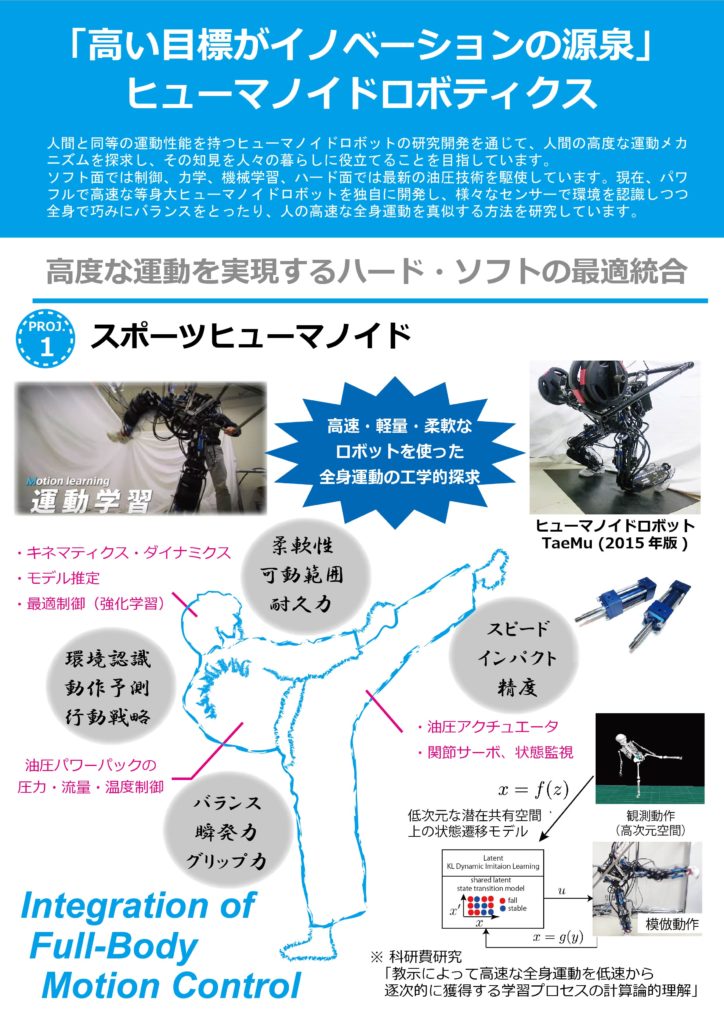
- 等身大ヒューマノイドロボットの設計製造
- 電動油圧パワーユニットの開発
- 関節サーボ系(位置、速度、トルク制御)
- 全身力制御(接触力制御)
- 不整地歩行、転倒回避制御
- 全身運動学習への応用
最適接触力制御によるヒューマノイドロボットH1Tの不整地歩行(IEEE-RAS Humanoids2018)
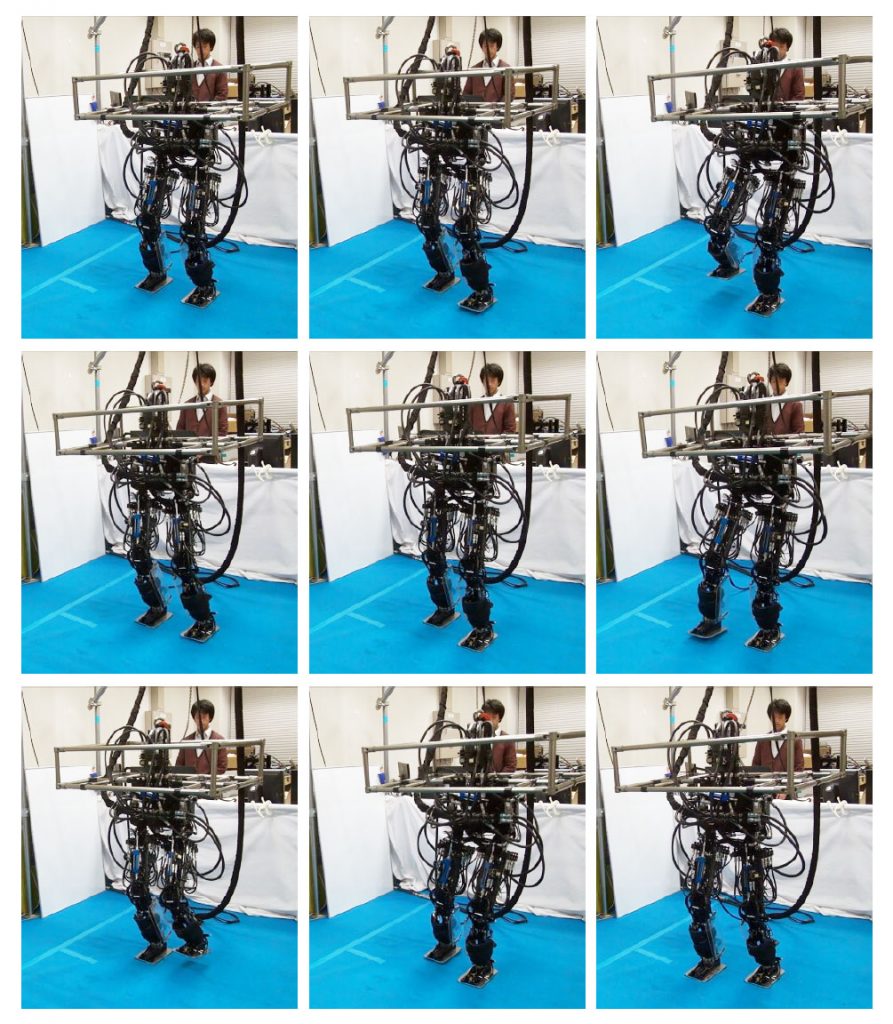
ヒューマノイドロボットH1Tの静歩行の様子(IFPEX2017型)
要素技術
単脚ロボット(2013年記者発表当時)
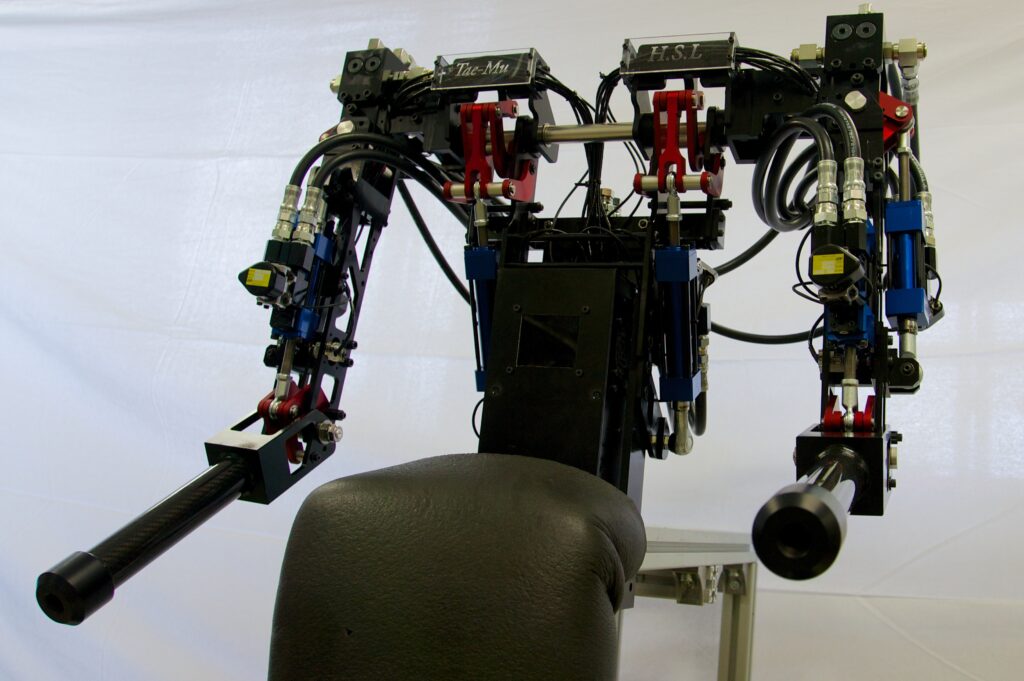
双腕ロボットH1U(IREX2013型)
発表論文
過去の実績
詳しくは過去の研究をご覧ください。
2025/10/30