RSJ2025@東京で研究発表
2025/09/28
第43回日本ロボット学会学術講演会(RSJ2025)が東京科学大学 大岡山キャンパスで開催され、9件の論文発表を行いました。
学会を運営された方々、関係者の皆様、ありがとうございました。
-
安藤了, 荒川拓也, 弘中剛史, 玄相昊, 油圧モジュラーロボットのための軽量・小型コネクタ, 第43回日本ロボット学会学術講演会, 2025.
-
白根拓実, 川戸咲智子, 玄相昊, 板金を用いた仮設木製油圧ロボットアームの開発, 第43回日本ロボット学会学術講演会, 2025.
-
下入佐太一, 加藤丈琉, 玄相昊, 4連油圧シリンダモジュールを用いた軽量2脚ロボットの設計, 第43回日本ロボット学会学術講演会, 2025.
-
鈴村拓心, 織田健吾, 玄相昊, モジュラー油圧回路MHSBを搭載した冗長マニピュレータの最適軌道計画, 第43回日本ロボット学会学術講演会, 2025.
-
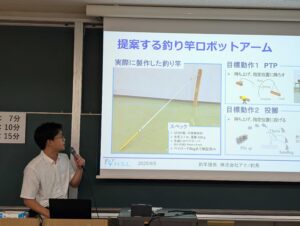
辻本武, 玄相昊, 一本釣りを模した弾性ロッドアームの提案, 第43回日本ロボット学会学術講演会, 2025.
-
田寺将樹, 玄相昊, ゴム人工筋とラチェット機構を用いた無限回転駆動方法の提案, 第43回日本ロボット学会学術講演会, 2025.
-
青山敦一, 織田健吾, 玄相昊, 液圧共有が可能な電動油圧式モジュラー移動ロボットのコンセプト検証, 第43回日本ロボット学会学術講演会, 2025.
-
松本侑大, 玄相昊, 空気圧人工筋と2自由度球面リンク機構を用いた3自由度手首の試作と水中物体把持,第43回日本ロボット学会学術講演会, 2025.
-
Jun Gu, Chikaze Taniguchi, Sangho Hyon, Sim2Real Evaluation of Torque-Controlled Actuator Models for Reinforcement Learning in Hydraulic Robots, The 43rd Annual Conference of the RSJ, 2025.